


汽車PCB之解決自動駕駛系統中定位問題的幾種相關思路
在自動駕駛技術問題中,定位技術(自身定位以及對周圍環境相對位置的認知)似乎是無人駕駛汽車最難掌握的技術,這與城市的動態性質有關。例如施工路面、封閉道路、新標志和缺失的道路標志等,都是這種動態性和不確定性的例子。人類面對以上隨時隨地可能發生改變的因素都會感到困惑,更不用說機器了。目前沒有方法可以完美地解決自動駕駛汽車的定位問題,但以下幾種是當前最為有效也最有希望解決問題的辦法。不同公司有不同的傾向性選擇,本文將根據具體的公司策略對三種定位方法進行介紹。
自從特斯拉和Waymo等公司出現以來,車企對自動駕駛技術的關注愈發增加。汽車PCB小編了解到,這種情況在2018年更甚,從而加速了無人駕駛汽車盡快落地的可能。例如,通用汽車公司在舊金山的員工已經用上了沒有方向盤或踏板的cruise;福特、大眾、豐田和奔馳也都在自動駕駛競爭之列;上個月,特斯拉在芯片發布會上宣布,到2020年他們將制造出完全自動駕駛汽車。
無人駕駛的實現前途光明,但道路曲折。目前自動駕駛仍然面臨很多難題,例如需要快速而連續地分析數據流、需要做對機器來說很繁瑣但對人類來說只是雞毛蒜皮的一些小事等。具體來說,物體檢測、距離、速度、定位和交通法規等都是在駕駛過程中做決策時需要考慮的因素。為了達到SAE標準中的L5級別,計算機駕駛系統需要能夠執行上述所有基本任務,找到針對不同問題的技術解決方案。
定位技術(自身定位以及對周圍環境相對位置的認知)似乎是無人駕駛汽車最難掌握的技術,這與城市的動態性質有關。例如施工路面、封閉道路、新標志和缺失的道路標志等,都是這種動態性和不確定性的例子。人類面對以上隨時隨地可能發生改變的因素都會感到困惑,更不用說機器了。目前沒有方法可以完美地解決自動駕駛汽車的定位問題,但以下幾種是當前最為有效也最有希望解決問題的辦法。不同公司有不同的傾向性選擇,本文將根據具體的公司策略對三種定位方法進行介紹。
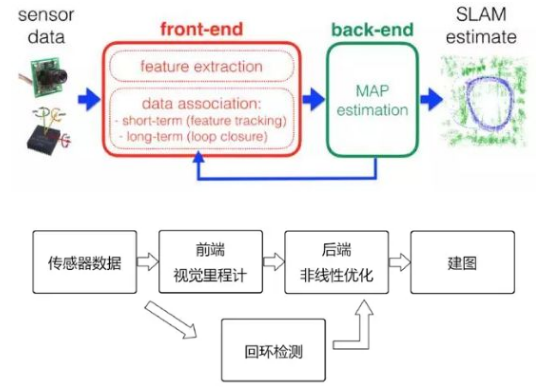
以特斯拉為例的一類企業傾向于使用基于視覺的Visual SLAM(簡稱VSLAM)技術進行定位,他們將盡可能多的視覺傳感器置入汽車中,不依靠預先錄制的地圖,而是希望將圖像處理和機器學習結合起來,讓特斯拉車輛能夠對周圍環境做到實時了解。特斯拉車輛隨時隨地都在學習并與其他車輛分享知識。他們依靠周圍的實時環境數據而不是歷史數據,不存在依賴過時地圖而出錯的風險。
特斯拉的目標非常明確,即建造可以在任何條件下駕駛的車輛而不受周圍環境的影響。前段時間特斯拉的芯片發布會上,因馬斯克diss激光雷達還引起了一場軒然大波。馬斯克說,使用激光雷達的定位方法擺脫了“丑陋,昂貴且不必要”的繪圖設備,為此付出的代價是在處理不確定性時更加依賴相機和軟件。特斯拉人工智能高級主管 Andrej Karpathy 強調物理數據的作用是無法代替的,相對于利用激光雷達建立虛擬高精地圖來說,特斯拉更相信現實的物理數據,看圖比看雷達更真實。
目前,使用VSLAM實現定位的自動駕駛車輛主要配備三類傳感器:單目、雙目(或多目)、RGBD。此外還有魚眼、全景等特殊相機,由于在研究和產品中都屬于少數在此不做介紹。就實現難度而言,這三類方法難易程度從難到易依次為:單目視覺、雙目視覺、RGBD。在定位過程中,VSLAM自動駕駛車輛從一個未知環境中的未知地點出發,在運動過程中通過以上這些視覺傳感器觀測定位自身位置、姿態、運動軌跡,再根據自身位置進行增量式的地圖構建,從而達到同時定位和地圖構建的目的。定位和建圖是兩個相輔相成的過程,地圖可以提供更好的定位,而定位也可以進一步擴建地圖。
通用汽車和奔馳都看好通過激光雷達或GPS預先制作的高精地圖來進行定位的方法。通用汽車于2017年收購了自己的激光雷達供應商。福特與百度合作,向一家激光雷達供應商Velodyne 投資1.5億美元,奔馳也與Velodyne簽訂激光雷達供應合約。
激光雷達是非常傳統的定位傳感器。它可以提供機器人本身與周圍環境障礙物間的距離信息。電路板廠獲悉,常見的激光雷達有SICK、Velodyne、Rplidar等。使用激光雷達制作高精地圖,實際上就是利用激光點云融合技術進行激光雷達掃描,返回場景分布點的技術。激光點云融合的技術又分為兩種,一是基于點云融合的算法,其應用場景較廣,不僅限于GPS場景;第二種是基于比較精確的差分GPS和精確慣導,其對場景依賴較強,必須在比較開闊的場景使用,對于高架橋等GPS信號弱的場景效果不佳。基于圖像和GPS技術解決方案精度比較差,主要用來制作L2、L3的ADAS地圖,而激光點云則可以滿足L4、L5的需求。
這類車輛依賴于預先記錄好的3D高分辨率地圖,而這些地圖是使用配備激光雷達的車輛預先捕獲的。然后,自動駕駛車輛可以使用其自身配備的激光雷達設備獲取周邊環境的信息,與預先制作的高精地圖進行比對,判斷環境是否已經改變,然后在地圖涵蓋區域內實現自動駕駛。這顯示了相對來說更加廣泛的自動駕駛策略。為了保持地圖的準確性和車輛的可用性,需要市政當局和汽車制造商之間更廣泛的合作,以創建和維護最新的高精度地圖供車輛使用。
以凱迪拉克的超級巡航系統為例,只有當車身雷達獲取的信息與高精地圖信息一致并通過安全檢查時,車輛才能在預存了高精地圖的高速公路上導航行駛。這種方法提供了高度的可靠性和可預測性,但高精地圖所需要處理的數據量巨大,必須使用數據中心計算機集群來做處理,并且涉及很多并行計算和處理,這些對數據處理能力都是極大的考驗;高精地圖的實時更新也相當重要,道路環境有可能在不斷的變化,需要實現快速有效的更新。以上這些由于記錄地圖和使用激光雷達設備制造車輛所需的努力,都使得實現無人駕駛所付出的成本相對更高。
自動駕駛定位的另一種方法,不關注如何使汽車更靈活地適應環境,而是關注如何讓環境為自動駕駛汽車服務,即創造更智能的環境。這減輕了車輛的負擔,使其能夠找出其環境中的所有不確定因素。在這種情況下,變化的環境因素會自己“找上門”,讓車輛更準確地了解到周圍環境的狀況,建筑物可以直接“告訴”進入的汽車建筑區域和臨時車道的具體位置。
大眾汽車一直在努力建立自己作為V2X技術先驅的身份。在2017年大眾就宣布所有2019年的車型都將配備完整的V2X功能套件。這些連接將提供大約500米以內的交通狀況、事故和與當地環境共享的其他交通狀況信息,甚至更廣。
通過車聯網方法進行定位的車輛通過GPS、RFID、傳感器、攝像頭圖像處理等裝置,在由車輛位置、速度和路線等信息構成的巨大交互網絡中完成自身環境和狀態信息的采集。在互聯網信息庫中,所有車輛將自身的各種信息傳輸匯聚到中央處理器,實現位置信息的交互共享。目前,國家強制要求所有運營車輛都要轉配車載定位終端,同時接入相關企業服務平臺,并最終接入省部級服務平臺。
具體來說,車輛節點的定位和位置感知技術是車聯網的技術核心。定位強調位置信息的唯一性,即定位得到的是真實的地理坐標信息,而位置感知側重于節點之間在位置上的相對性,反映的是移動節點在時間維度和空間維度上的軌跡。
位置感知中,其位置信息是參照錨節點來計算的,而錨節點的產生視不同的算法實現而不同,主要采用非測距技術(Renge-free)來定位。無線測距的基本原理分為三邊測量法、三角測量法、極大似然估計法和質心算法四種類型。三邊測量法原理比較簡單,是在已知3個錨節點二維坐標信息的前提下,就可以計算出1個未知節點的位置信息;三角測量法的原理是在網絡中選定一系列的錨節點構成相互連接的三角形,通過測量某一三角形的三個角節點到某一位置節點的相對水平角度來對節點進行定位。
車聯網的定位技術則是通過合理部署在城市交通道路周邊的RSU,利用無線測距技術實現對移動中車聯的實時定位。目前所采用的技術主要有利用接收信號強度值(RSSI)、到達時間(TOA)、到達時間差(TDOA)、到達角度(AOA)及到達頻率差(FDOA)等。FDOA定位技術具有無模糊區、精度高等優點,它可以與TDOA等定位技術結合,實現更加完善的定位功能,成為車聯網定位技術的一個發展方向。在此不做具體介紹。
雖然目前對車聯網定位和感知技術的研究取得了一定的成果,但仍然有很多問題需要進一步解決,主要體現在專門針對車聯網的定位和感知技術、室外移動三維定位技術、精準無縫的協作定位等方面。當然,能夠輔助實現定位目的的有例如GPS 、衛星、激光雷達、相機及其他多種傳感器,本文介紹的三種方法是實現自動駕駛定位的三種不同思路,思路上的不同并不排斥具體使用技術上的借鑒與融合。
技術只是自動駕駛的一個方面,道路安全法律法規也需要適應自動駕駛市場的變化。今年福特、通用和豐田在自動駕駛汽車相關安全法規上就達成了合作伙伴關系。另外,線路板廠發現,在人類社會不斷向前發展的進程中,經驗是一個不可忽視的關鍵因素,無論現時段自動駕駛面臨了什么小成就和大挫折,都必須清楚地明白一點:我們生活在技術不斷創新的時代,新技術解決新困難,時間會說明自動駕駛是如何向我們一步步走來的。
| 我要評論: | |
| 內 容: |
(內容最多500個漢字,1000個字符) |
| 驗證碼: | 看不清?! |
相關資訊




最新產品
同類文章排行
- 汽車通訊模塊線路板設計密度越高越好嗎
- 廢電池線路板資源回收的重要性
- 汽車電路板圖像的采集
- 汽車無線充電線路板面臨新挑戰
- 線路板電磁屏蔽注意事項
- 電池電路板的自動檢測方式
- 電路板廠蝕刻液的技術性能
- 5G天線PCB的設計規范
- 汽車線路板式電器盒的設計技術將面臨更多挑戰
- 線路板綠色回收的方法之機械處理法
最新資訊文章
您的瀏覽歷史


共有-條評論【我要評論】